mwp Radar View
Unmaintained Article Please check the manual for more up-to-date information.
mwp since 2020-05-11 supports the display of "radar" contacts. This provides a view of adjacent aircraft obtained via a number of interfaces:
-
inav-radar. inav radar works in conjunction with inav flight controllers to broadcast the location of UAS fitted with an ESP32 LoRa module. mwp can listen to one of these modems in ground station mode to display the positions of the rest of the 'swarm' (up to 4 UAS); technical / MSP details.
-
Full size aircraft reported by the MAVLink 'Traffic Report' message. An example is the uAvionix PingRX, a compact device that receives ADS-B location data from full sized aircraft and publishes the locations as MAVLink. For a ground based installation, this device has around a 40Km detection radius. MAVLink ICD.
-
Proximity alerts (visual and audible) for manned (ADS-B) aircraft, based on planned or actual home location.
mwp can receive the 'radar' data over one or two connections, either of both may be active, and mwp can receive and display 'own vehicle' telemetry (MSP, LTM or Smartpost), 'inav-radar' and 'MAVlink Traffic' data simultaneously. Radar data may be received over:
- The main serial port device (see caveat for inav-radar) or
- device(s) defined by the
radar-deviceCLI or configuration parameter (MAVLink Traffic, inav-radar)
The radar-device option is defined by the standard mwp naming scheme:
- A serial device node, with optional baud rate, e.g.:
-
/dev/ttyACM0,/dev/ttyUSB4@567600,/dev/rfcomm3 - Serial defaults to 115200 baud, but may be set in the device name (@baudrate)
-
- A Bluetooth address (for BT bridges)
00:0B:0D:87:13:A2
- An IP address, e.g. for simulation, recording replays or serial multiplexer.
-
udp://:30001local UDP listener.
-
The specific (not shared with the main serial port) radar device(s) may be defined on the command line, or in the static command options file (~/.config/mwp/cmdopts):
mwp --radar-device udp://:30001$ cat ~/.config/mwp/cmdopts
# Default options for mwp
# using udev rule to associate a specifc USB-TTL adaptor to a name
--radar-device=/dev/pingRX@57600
Multiple devices may be defined, e.g.
- As separate options,
--radar-device=/dev/pingRX@57600 --radar-device= /dev/inavradar@115200 - As a comma separated list:
--radar-device=/dev/pingRX@57600,/dev/inavradar@115200
Any bespoke radar-device is started automatically on startup (or when it shows up). It is not managed via the serial Connect button.
The main serial port may be used for MavLink Traffic without any further configuration. For inav-radar, to use the main msp port for inav-radar (vice using --radar-device), it is still necessary to add a command option to mwp; it needs to told to relax the default inbound msp direction check.
This is enabled as
mwp --relaxed-msp
which should be 'mainly harmless' for normal operations. It's entirely acceptable to put this in ~/config/mwp/cmdopts to make it the default, as the protocol check dilution is very mild.
The following dconf setting affect the radar function:
| Setting | Usage |
|---|---|
radar-list-max-altitude |
Maximum altitude (metres) to show targets in the radar list view; targets higher than this value will show only in the map view. Setting to 0 disables. Note that ADS-B altitudes are AMSL (or geoid) |
radar-alert-altitude |
Target altitude (metres) below which ADS-B proximity alerts may be generated. Requires that 'radar-alert-range' is also set (none zero). Setting to 0 disables. Note that ADS-B altitudes are AMSL (or geoid). |
radar-alert-range |
Target range (metres) below which ADS-B proximity alerts may be generated. Requires that 'radar-alert-altitude' is also set (none zero). Setting to 0 disables. |
Note that proximity alerts require that both the radar-alert-altitude and radar-alert-range values are set, and that there is a planned or actual home location.
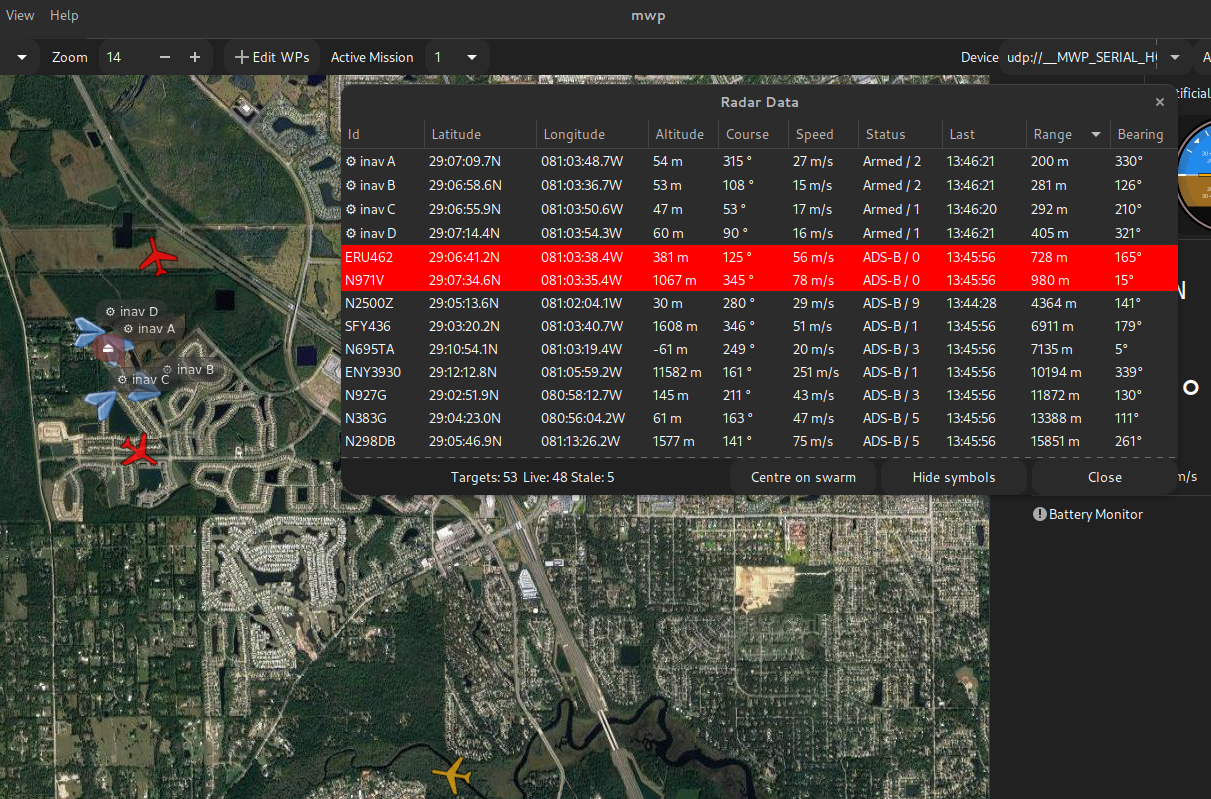
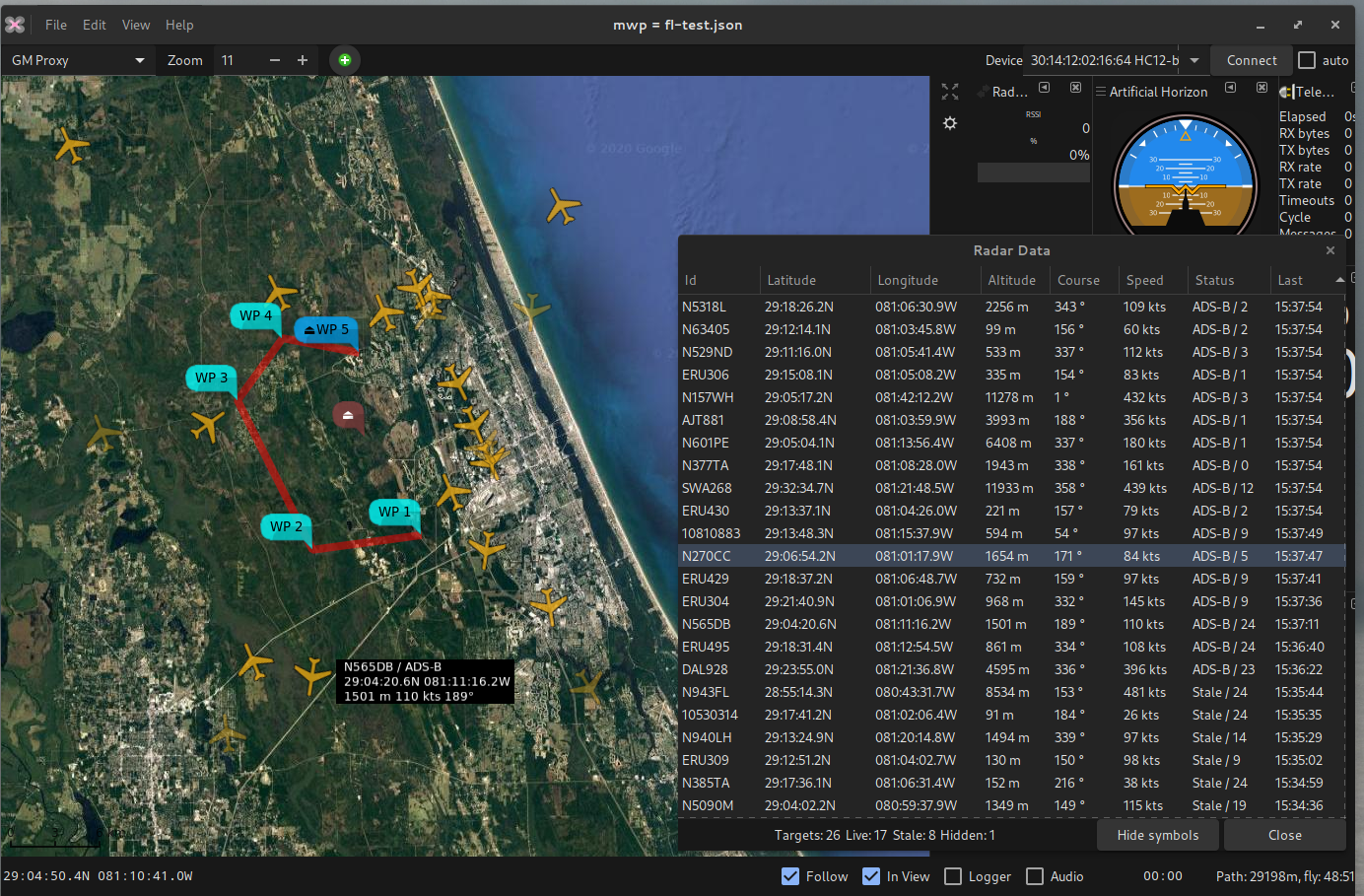
Once the radar interface is open, radar tracks are displayed on the map and in a list available from the "View -> Radar View' menu option.
- The list view is sort-able on the
Id,Status,Last(time) andRangecolumns. - The map visualisation may be toggled by the
Hide Tracks(Show Tracks) button. - List and map views are updated in (near) real time.
- Preference for display units are used for positions, altitude and speed.
| Type | Usage |
|---|---|
| inav-radar | Node Id (typically 'A' - 'D') |
| Traffic Report | Callsign if reported, otherwise [ICAO number] |
Radar contacts have one of the following status values:
| Status | Explanation |
|---|---|
| Undefined | Not shown in list or on the map |
| Stale | The last contact was more that 120s previous. Displayed in the list and shown on the map with reduced intensity or an inav-radar node has'lost' status |
| Armed | An active inav-radar contact |
| ADS-B | A live MAVLink Traffic report |
| Hidden | A MAVLink Traffic contact is between 5 and 10 minutes old. It remains in the list but is not displayed in the map. MAVLink Traffic Report tracks are removed from the list (and internal storage) after 10 minutes inactivity. inav-radar ground station |
Stale / 'Lost' inav-radar contacts do not expire, as they may relate to a lost model.
The number displayed after the status text is:
| Type | Usage |
|---|---|
| inav-radar | The link quality |
| Traffic Report | Time since last communication in seconds |
- Proximity Alerts
- Live and stale aircraft
- Aircraft tooltip
- Mission Plan
- List view
There are simulators for both inav-radar and MAVLink 'Traffic Report' (e.g. uAvionix PingRX) in the mwptools/samples/radar directory.
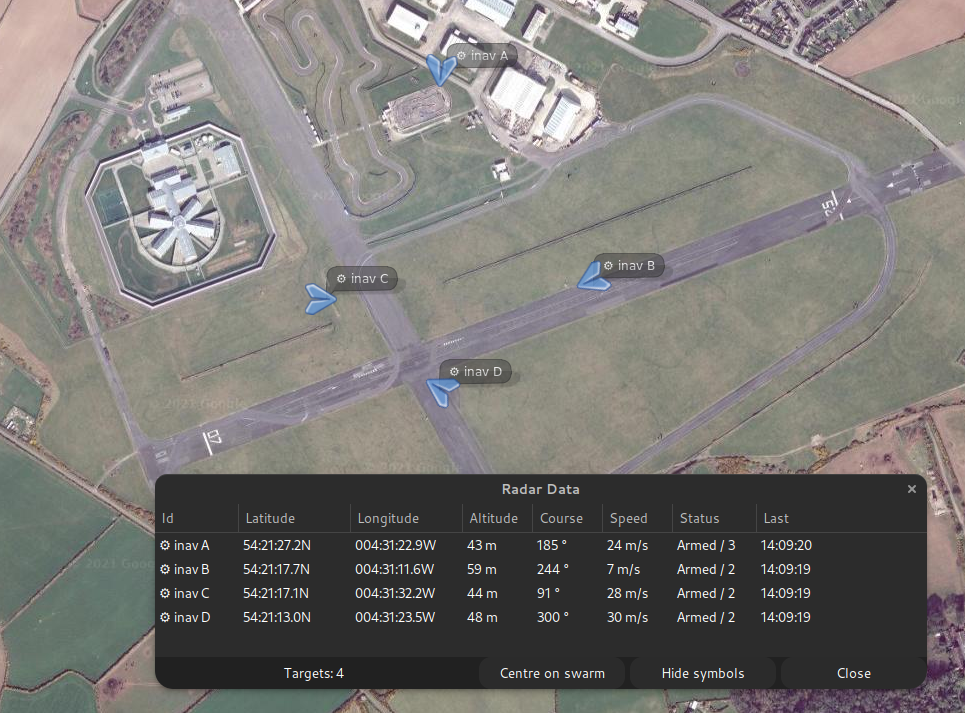
Any map symbol used by mwp can be changed by the user; in the image above, the inav radar node symbol has been changed from the default stylised inav multirotor to a smaller version of the mission replay "paper plane" symbol as follows:
- All the default mwp icons / map symbols can be found in
/usr/share/mwp/pixmaps/(/usr/localon FreeBSD). - Create your own icon with the equivalent name in
~/config/mwp/pixmaps/.
The icons in ~/config/mwp/pixmaps/ are found before the defaults.
mkdir -p `~/config/mwp/pixmaps
# copy the preview image
cp /usr/share/mwp/pixmaps/preview.png ~/config/mwp/pixmaps/
# (optionally) resize it to 32x32 pixels
mogrify -resize 80% ~/config/mwp/pixmaps/preview.png
# and rename it, mwp doesn't care about the 'extension', this is not MSDOS:)
mv ~/config/mwp/pixmaps/preview.png ~/config/mwp/pixmaps/inav-radar.svg
# and verify ... perfect
file ~/.config/mwp/pixmaps/inav-radar.svg
/home/jrh/.config/mwp/pixmaps/inav-radar.svg: PNG image data, 32 x 32, 8-bit/color RGBA, non-interlaced
The MAVLink implementation is comprehensively documented by the vendor.
The following is required by a device wishing to act as a ground node (it either masquerades as an inav FC, or declares itself a GCS)
-
Receive and respond to the following MSP data requests:
- MSP_FC_VARIANT (responding as
INAVor (from 2021/05/06)GCSfor generic ground control stations). - MSP_FC_VERSION (in
INAVandGCSmodes) - MSP_NAME (in
INAVandGCSmodes) - MSP_STATUS (in
INAVmode) - MSP_ANALOG (in
INAVmode) - MSP_BOXIDS (in
INAVmode) - MSP_RAW_GPS (in
INAVmode)
- MSP_FC_VARIANT (responding as
-
Receive unsolicited
- MSP2_COMMON_SET_RADAR_POS
Note that the device firmware assumes that MSP buffer sizes are "as specification"; exceeding the expected message buffer size may crash the device (mea culpa).