Robot API status
Table of Contents generated with DocToc
A robot controller often includes a state machine to manage different phases of robot operation. CRTK does not mandate the use of a state machine, but there are some basic states that apply to most, if not all, robots. We call these meta-states. Thus, CRTK defines commands to initiate transitions from one meta-state to another and to query the current meta-state. In addition, we specify queries whether the robot is homed and/or busy.
The four robot meta-states (hereafter called states) are illustrated in the following notional state machine:
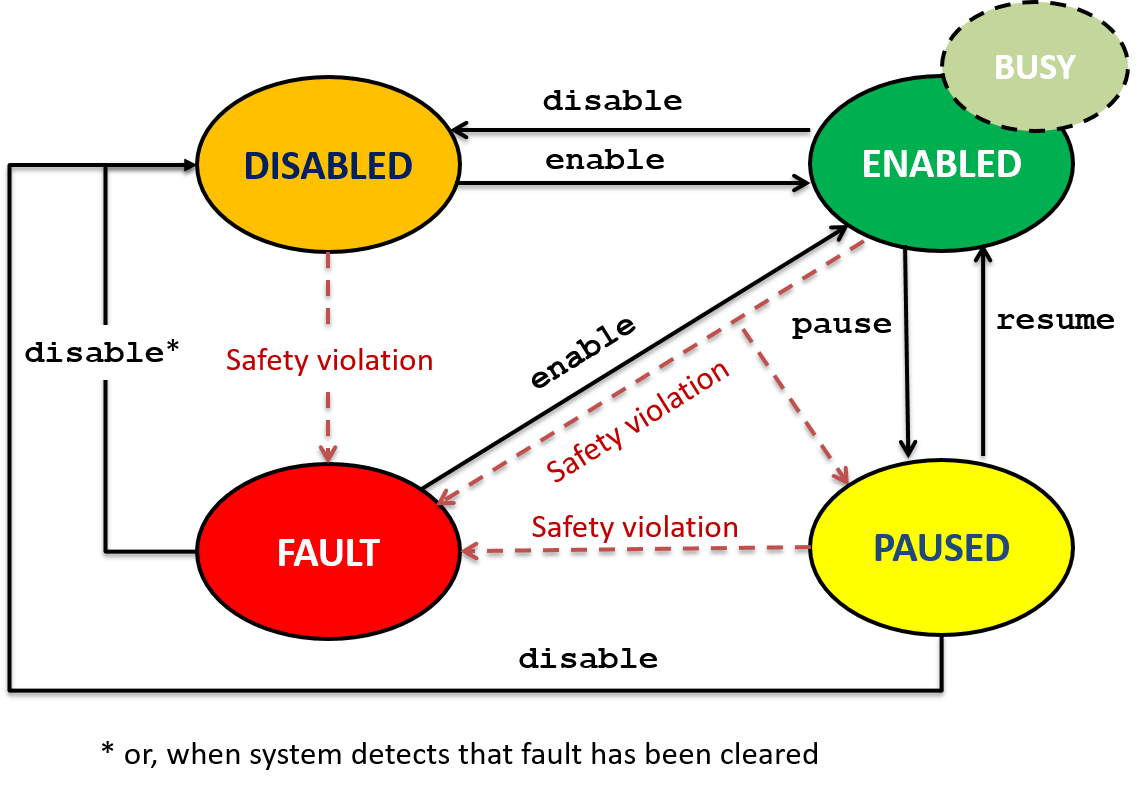
For clarity, all state names are UPPER-CASE and commands to transition between states are lower-case. Although not shown in the figure, state queries are also represented in lower-case. In addition, the figure above shows the BUSY mode, which indicates that the robot is busy completing a specified action (only relevant in the ENABLED state). The HOMED mode is not shown, but is relevant to all states. See the queries is_homed and is_busy described below.
The following subsections describe the states.
In this state, the drive (motor) power is disabled. This is typically the initial state of the robot.
If, however, there is a fault condition that would prevent the robot from being powered on (via the enable
command), the system should transition to the FAULT state.
In this state, the motor power is enabled and the robot is able to move. We identify the BUSY operating
mode, which indicates that a command is active (see is_busy query). Application software may also wish
to query the is_homed mode, since robots that require homing will typically allow limited motions when
is_homed is False. For example, in this mode the robot can perform homing motions, such as moving until
a limit switch is encountered, or it may be able to make relative motions in joint space.
Note that specific robot implementations may have several states in this category; for example, a separate state for
each motion type.
In this state, the motor power is enabled, but the robot cannot be moved. The system transitions to this
state in response to a pause command or some types of safety violations. Exiting this state requires an
explicit command, such as resume to return to the ENABLED state.
Not all robot systems will natively support a PAUSED state, but this can be implemented in the interface layer by rejecting certain commands (e.g., motion commands) when the system is in this state.
This state could also be used to indicate that the interface no longer has control of the robot; for example, if pre-empted by another controller, such as a teach pendant.
The robot enters the FAULT state when a fault condition (safety violation) causes the motor power to be disabled. If the robot system is able to monitor the fault condition, the system will remain in this state until the fault is cleared; once cleared, the system transitions to the DISABLED state.
If the system cannot monitor the fault condition, there are two implementation choices:
- The system can transition to the DISABLED state (instead of FAULT), which indicates that motor power is disabled, but there is no known fault condition.
- The system can remain in the FAULT state until the application software issues a
disableorenabledcommand, at which time the system can attempt to transition to the DISABLED or ENABLED state, respectively.
Note that there is no API command to cause the system to transition to the FAULT state.
If the application software detects a safety violation, it can use the pause command to stop motion or the
disable command to turn off motor power. The rationale is that the FAULT state is intended to indicate a persisent
fault condition (detected by the system), whereas the system cannot determine whether an application-level
fault is persistent.
The following table indicates the state transitions corresponding to the commands listed in the top row.
| command STATE |
enable | disable | pause | resume |
|---|---|---|---|---|
| DISABLED | ENABLED | DISABLED | DISABLED (invalid) |
DISABLED (invalid) |
| ENABLED | ENABLED | DISABLED | PAUSED | ENABLED (invalid) |
| PAUSED | PAUSED (invalid) |
DISABLED | PAUSED | ENABLED |
| FAULT | ENABLED (retry) |
DISABLED (retry) |
FAULT (invalid) |
FAULT (invalid) |
In addition to the commands in the above table, there is a home command to initiate the homing sequence and an unhome command to reset the home flag. Motion commands are documented here.
Each of the meta-states has a corresponding query command if the robot is in that state. The state queries are is_disabled, is_enabled, is_paused, and is_fault. They produce the obvious result, which is that they return True if the robot is in that state and false otherwise (note that these states are mutually exclusive, so exactly one will be True at any given time).
In addition, the mode queries are is_busy and is_homed:
-
is_busy: True if the robot is currently executing a command. Note that the robot might not be physically moving; for example, it may have reached its position destination or it may be "moving" at zero velocity. The intent here is to identify cases where the application software may wish to wait before sending the next command. The recommended behavior is for themovecommands to setis_busyTrue while the motion is in progress, but for theinterpolateandservocommands to setis_busyFalse. Thehomecommand would also setis_busyTrue while the homing motion is in progress. -
is_homed: True if the homing process has been completed (should return True for a robot that does not require homing).
Based on the above, it is possible to define an is_ready query that indicates when the robot is ready to accept motion commands. In this case, is_ready would be equivalent to (is_enabled && is_homed). To avoid pre-empting an existing motion, one could check (is_enabled && is_homed && !is_busy).