关于Generalization to large models章节中的参数问题 #2
Comments
|
@MaybeShewill-CV 你好,你跑一张图像多长时间?准确率怎样? |
|
@Soulempty tensorrt 上不计算显存拷贝的开销能到105fps左右 不过我是gtx 1070显卡 性能比较差:) |
|
@Soulempty ok 加你了 |
|
Hi, @MaybeShewill-CV Can you show the code? I can't reduce my loss on my code which is followed the author thinking. And I don't know what's wrong with my code. It's too slow to decrease the loss. Here are my code: StemBlock# StemBlock
class StemBlock(nn.Module):
def __init__(self, in_ch=3, out_ch=16):
# in_ch: default is 3.
# out_ch: default is 16.
super(StemBlock, self).__init__()
self.conv1 = nn.Conv2d(in_ch, out_ch, kernel_size=3, stride=2, padding=1)
self.conv2 = nn.Conv2d(out_ch, out_ch//2, kernel_size=1, stride=1)
self.conv3 = nn.Conv2d(out_ch//2, out_ch, kernel_size=3, stride=2, padding=1)
self.conv4 = nn.Conv2d(out_ch * 2, out_ch, kernel_size=3, stride=1, padding=1)
self.maxPooling = nn.MaxPool2d(kernel_size=3, stride=2, padding=1)
self.bn1 = nn.BatchNorm2d(num_features=out_ch)
self.bn2 = nn.BatchNorm2d(num_features=out_ch//2)
self.relu = nn.ReLU()
def forward(self, x):
x = self.conv1(x)
# x1
x1 = self.conv2(x)
x1 = self.relu(self.bn2(x1))
x1 = self.conv3(x1)
# [H/4, W/4, C]
x1 = self.relu(self.bn1(x1))
# x2
x2 = self.relu(self.bn1(x))
# [H/4, W/4, C]
x2 = self.maxPooling(x2)
x = torch.cat((x1, x2), 1)
x = self.conv4(x)
x = self.relu(self.bn1(x))
return xContextEmbeddingBlock:class ContextEmbeddingBlock(nn.Module):
def __init__(self, in_ch=128, out_ch=128, stride=1):
super(ContextEmbeddingBlock, self).__init__()
self.gapPooling = nn.AdaptiveAvgPool2d((1,1))
self.bn = nn.BatchNorm2d(num_features=in_ch)
self.conv1 = nn.Conv2d(in_ch, out_ch, kernel_size=1, stride=1)
self.relu = nn.ReLU()
self.conv2 = nn.Conv2d(in_ch, out_ch, kernel_size=3, stride=1, padding=1)
def forward(self, x):
x1 = self.gapPooling(x)
# [None, C, 1, 1]
if not x1.size()[0] == 1:
x1 = self.bn(x1)
x1 = self.conv1(x1)
if not x1.size()[0] == 1:
x1 = self.relu(self.bn(x1))
else:
x1 = self.relu(x1)
x = torch.add(x1, x)
x = self.conv2(x)
return xDWConv:class DWConv(nn.Module):
def __init__(self, in_ch, out_ch, stride=1):
super(DWConv, self).__init__()
self.depth_conv = nn.Conv2d(in_ch, in_ch,
kernel_size=3,
stride=stride,
padding=1,
groups=in_ch)
self.point_conv = nn.Conv2d(in_ch, out_ch,
kernel_size=1,
stride=1,
groups=1)
def forward(self, x):
x = self.depth_conv(x)
x = self.point_conv(x)
return xGatherAndExpansionLayer:class GatherAndExpansionLayer(nn.Module):
def __init__(self, in_ch, out_ch, stride=1):
super(GatherAndExpansionLayer, self).__init__()
error = "GatherAndExpansionLayer's stride only support 1 or 2."
assert stride in [1, 2], error
self.stride = stride
if self.stride == 2:
self.conv2_1 = nn.Conv2d(in_ch, in_ch, kernel_size=3, stride=1, padding=1)
self.conv2_2 = DWConv(in_ch, 6 * in_ch, stride=2)
self.conv2_3 = DWConv(6 * in_ch, 6 * in_ch, stride=1)
self.conv2_4 = nn.Conv2d(6 * in_ch, out_ch, kernel_size=1)
self.conv2_5 = DWConv(in_ch, out_ch, stride=2)
self.conv2_6 = nn.Conv2d(out_ch, out_ch, kernel_size=1, stride=1)
else:
self.conv1_1 = nn.Conv2d(in_ch, in_ch, kernel_size=3, stride=self.stride, padding=1)
self.conv1_2 = DWConv(in_ch, 6 * in_ch, stride=self.stride)
self.conv1_3 = nn.Conv2d(6 * in_ch, out_ch, kernel_size=1, stride=self.stride)
self.bn1 = nn.BatchNorm2d(num_features=in_ch)
self.bn2 = nn.BatchNorm2d(num_features=in_ch * 6)
self.bn3 = nn.BatchNorm2d(num_features=out_ch)
self.relu = nn.ReLU()
def forward(self, x):
if self.stride == 2:
x1 = self.conv2_1(x)
x1 = self.relu(self.bn1(x1))
x1 = self.conv2_2(x1)
x1 = self.bn2(x1)
x1 = self.conv2_3(x1)
x1 = self.bn2(x1)
x1 = self.conv2_4(x1)
x1 = self.bn3(x1)
x2 = self.conv2_5(x)
x2 = self.bn3(x2)
x2 = self.conv2_6(x2)
x2 = self.bn3(x2)
else:
x1 = self.conv1_1(x)
x1 = self.relu(self.bn1(x1))
x1 = self.conv1_2(x1)
x1 = self.bn2(x1)
x1 = self.conv1_3(x1)
x1 = self.bn3(x1)
x2 = x
x = torch.add(x1, x2)
x = self.relu(x)
return xDetailBranch:class DetailBranch(nn.Module):
def __init__(self):
super(DetailBranch, self).__init__()
self.conv1 = nn.Conv2d(3, 64, kernel_size=3, stride=2, padding=1)
self.conv2 = nn.Conv2d(64, 64, kernel_size=3, stride=1, padding=1)
self.conv3 = nn.Conv2d(64, 64, kernel_size=3, stride=2, padding=1)
self.conv4 = nn.Conv2d(64, 128, kernel_size=3, stride=2, padding=1)
self.conv5 = nn.Conv2d(128, 128, kernel_size=3, stride=1, padding=1)
self.bn1 = nn.BatchNorm2d(num_features=64)
self.bn2 = nn.BatchNorm2d(num_features=128)
self.relu = nn.ReLU()
def forward(self, x):
# S1
x = self.relu(self.bn1(self.conv1(x)))
x = self.relu(self.bn1(self.conv2(x)))
# S2
x = self.relu(self.bn1(self.conv3(x)))
x = self.relu(self.bn1(self.conv2(x)))
x = self.relu(self.bn1(self.conv2(x)))
# S3
x = self.relu(self.bn2(self.conv4(x)))
x = self.relu(self.bn2(self.conv5(x)))
x = self.relu(self.bn2(self.conv5(x)))
return xSemanticBranch:class SemanticBranch(nn.Module):
def __init__(self, is_train=False):
super(SemanticBranch, self).__init__()
self.is_train = is_train
# S1 and S2
self.stem = StemBlock(in_ch=3, out_ch=16)
# S3
self.ge1 = GatherAndExpansionLayer(in_ch=16, out_ch=32, stride=2)
self.ge2 = GatherAndExpansionLayer(in_ch=32, out_ch=32, stride=1)
# S4
self.ge3 = GatherAndExpansionLayer(in_ch=32, out_ch=64, stride=2)
self.ge4 = GatherAndExpansionLayer(in_ch=64, out_ch=64, stride=1)
# S5
self.ge5 = GatherAndExpansionLayer(in_ch=64, out_ch=128, stride=2)
self.ge6 = GatherAndExpansionLayer(in_ch=128, out_ch=128, stride=1)
self.ce = ContextEmbeddingBlock(in_ch=128, out_ch=128, stride=1)
def forward(self, x):
# S1 and S2
out1 = self.stem(x)
# out1: [None, 16, 128, 256]
# S3
x = self.ge1(out1)
out2 = self.ge2(x)
# out2: [None, 32, 64, 128]
# S4
x = self.ge3(out2)
out3 = self.ge4(x)
# out3: [None, 64, 32, 64]
# S5
x = self.ge5(out3)
x = self.ge6(x)
x = self.ge6(x)
out4 = self.ge6(x)
# out4: [None, 128, 16, 32]
# x: [None, 128, 16, 32]
x = self.ce(out4)
if self.is_train:
return x, out1, out2, out3, out4
else:
return xSegHeadBooster:class SegHeadBooster(nn.Module):
def __init__(self, in_ch, t_ch, out_ch, size):
super(SegHeadBooster, self).__init__()
self.conv1 = nn.Conv2d(in_ch, t_ch, kernel_size=3, stride=1, padding=1)
self.conv2 = nn.Conv2d(t_ch, out_ch, kernel_size=1, stride=1, bias=False)
self.bn = nn.BatchNorm2d(num_features=t_ch)
self.relu = nn.ReLU()
self.size = size
def forward(self, x):
x = self.conv1(x)
x = self.relu(self.bn(x))
x = self.conv2(x)
x = nn.functional.interpolate(x, size=self.size, mode='bilinear')
return xBiseNet_V2:class BiseNet_V2(nn.Module):
def __init__(self, num_classes=19, is_train=False):
super(BiseNet_V2, self).__init__()
self.is_train = is_train
# Common
self.dw = DWConv(in_ch=128, out_ch=128, stride=1)
self.bn = nn.BatchNorm2d(num_features=128)
self.conv1_1 = nn.Conv2d(128, 128, kernel_size=1, stride=1)
self.sigmoid = nn.Sigmoid()
# Detail Branch
self.detailBranch = DetailBranch()
self.conv3_3_2 = nn.Conv2d(128, 128, kernel_size=3, stride=2, padding=1)
self.avgPooling = nn.AvgPool2d(kernel_size=3, stride=2, padding=1)
# Semantic Branch
self.semanticBranch = SemanticBranch(is_train=self.is_train)
self.conv3_3_1 = nn.Conv2d(128, 128, kernel_size=3, stride=1, padding=1)
# Seg Head
size = (512, 1024)
self.segHead0 = SegHeadBooster(in_ch=128, t_ch=64, out_ch=num_classes, size=size)
self.segHead1 = SegHeadBooster(in_ch=16, t_ch=64, out_ch=num_classes, size=size)
self.segHead2 = SegHeadBooster(in_ch=32, t_ch=64, out_ch=num_classes, size=size)
self.segHead3 = SegHeadBooster(in_ch=64, t_ch=64, out_ch=num_classes, size=size)
self.segHead4 = SegHeadBooster(in_ch=128, t_ch=64, out_ch=num_classes, size=size)
# init weight
self.init_weight()
def forward(self, x):
# Detail Branch
dx = self.detailBranch(x)
dx1 = self.bn(self.dw(dx))
dx1 = self.conv1_1(dx1)
dx2 = self.bn(self.conv3_3_2(dx))
dx2 = self.avgPooling(dx2)
# Semantic Branch
if self.is_train:
sx, out1, out2, out3, out4 = self.semanticBranch(x)
out1 = self.segHead1(out1)
out2 = self.segHead2(out2)
out3 = self.segHead3(out3)
out4 = self.segHead4(out4)
else:
sx = self.semanticBranch(x)
sx1 = self.bn(self.dw(sx))
sx1 = self.sigmoid(self.conv1_1(sx1))
sx2 = self.bn(self.conv3_3_1(sx))
sx2 = nn.functional.interpolate(sx2, scale_factor=4, mode='bilinear')
sx2 = self.sigmoid(sx2)
# Aggregation Layer: element-wise product
d_out = torch.mul(dx1, sx2)
s_out = torch.mul(dx2, sx1)
s_out_ = nn.functional.interpolate(s_out, scale_factor=4, mode='bilinear')
out = d_out.add(s_out_)
# out: [None, 128, 64, 128]
out0 = self.bn(self.conv3_3_1(out))
out0 = self.segHead0(out0)
if self.is_train:
return out0, out1, out2, out3, out4
else:
return out0
def init_weight(self):
# Kaiming Normal
for ly in self.children():
if isinstance(ly, nn.Conv2d):
nn.init.kaiming_normal_(ly.weight, a=1)
if not ly.bias is None: nn.init.constant_(ly.bias, 0) |
|
@MikoyChinese I will release the code when prepared. I'm looking forward to the author's official implementation:) |
|
@MikoyChinese I have released my implementation. |
|
Thanks for your great work. |
|
@MikoyChinese Welcome. Still look forward origin implementation:) |
|
images.githubusercontent.com/15725187/79453548-6dee6100-801c-11ea-880d-228b89cf8999.png)
按照我对论文的理解,α是width multiplier与MobileNet中一致,d是depth multiplier就是module进行repeat了。比如说d=2,那么C1就再加一个C1吧,个人理解~ |
|
@ncuxiaogang 我之前的理解也是d指代module repeat的次数 不知道是不是原作者想表达的意思 哈哈 |
看了下你的代码实现,想请教下: |

|
@ncuxiaogang 1.Ct是我自己设置的 不知道是不是符合原作者的意思 2.CoinCheung 实现的是bisenetv1不是bisenetv2哈 :) |
里面有个BisenetV2文件夹,你可以进去看下 |
|
@ncuxiaogang 好的 我看看 有段时间没看了 可能更新过了吧 |
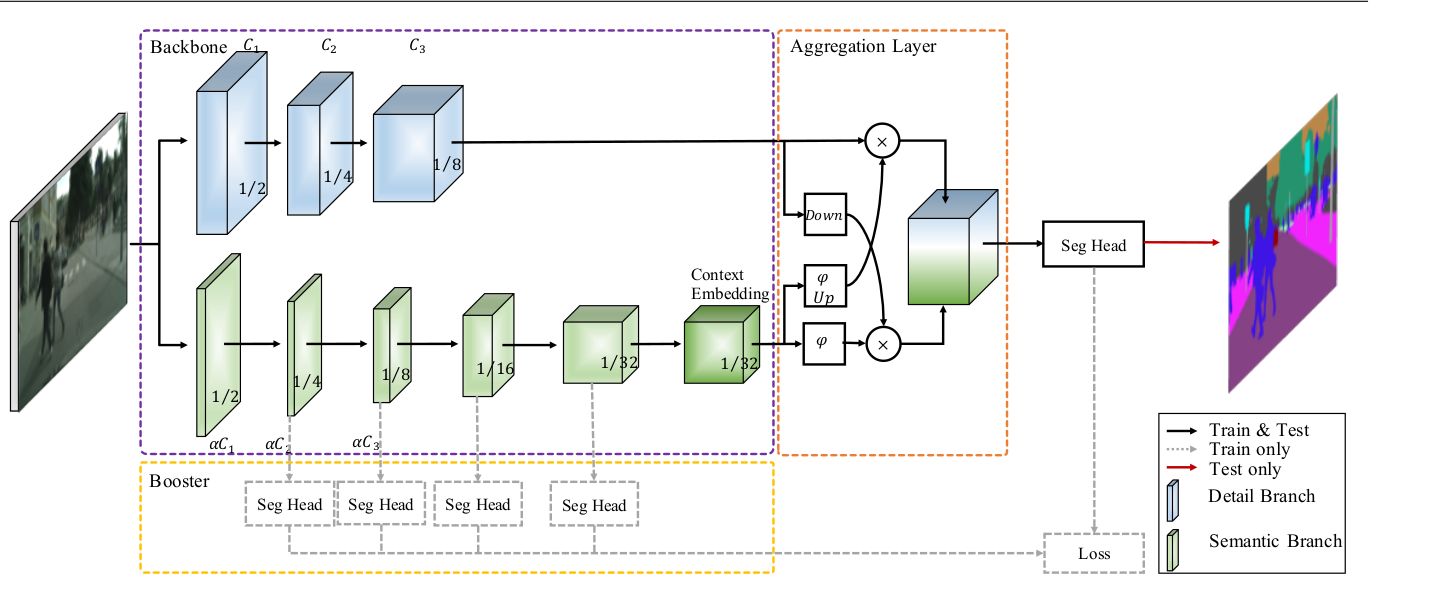
首先感谢大佬 @ycszen 的工作:)

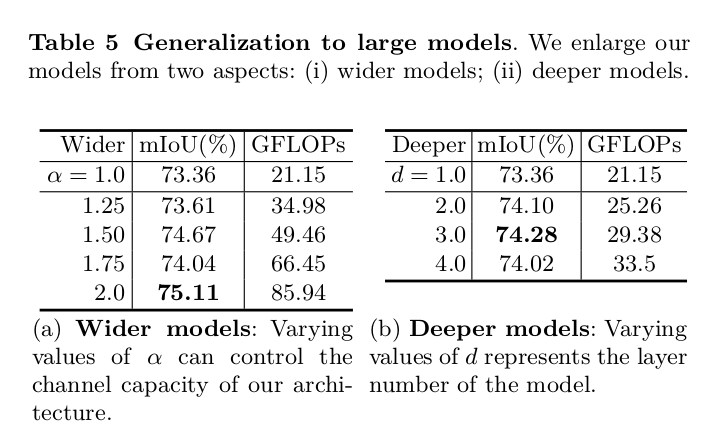
文章中有些我觉得写的不是很清楚的地方想问一下,关于generalization to large models章节中提到的两个参数α和d。
关于α,我觉得指的是进入segmentation heads模块之前的channel expansion倍数,如下图所示

那么这个d参数指的是什么呢,文章中说d参数控制的是模型的深度,那么这个d是指代上文中的什么参数呢,是module repeat的次数吗.
还有点疑惑就是table5下方的描述α控制模型的channel capacity而d控制layer nums.然后下文中说α是width multiplier,d是depth multiplier。请问这个地方上下文的表述是否一致。

这两个参数该如何理解更为准确呢。还请大佬有时间不吝赐教 :)
By the way 初步实现了下 确实很快:)
The text was updated successfully, but these errors were encountered: